 |













| MODEL: | |
|---|---|
| Cantidad: | |
XHY
DLL
ESPECIFICACIÓN
FIAMBRES
ZHECONECTORES CO., LTD DE JIANG DELI
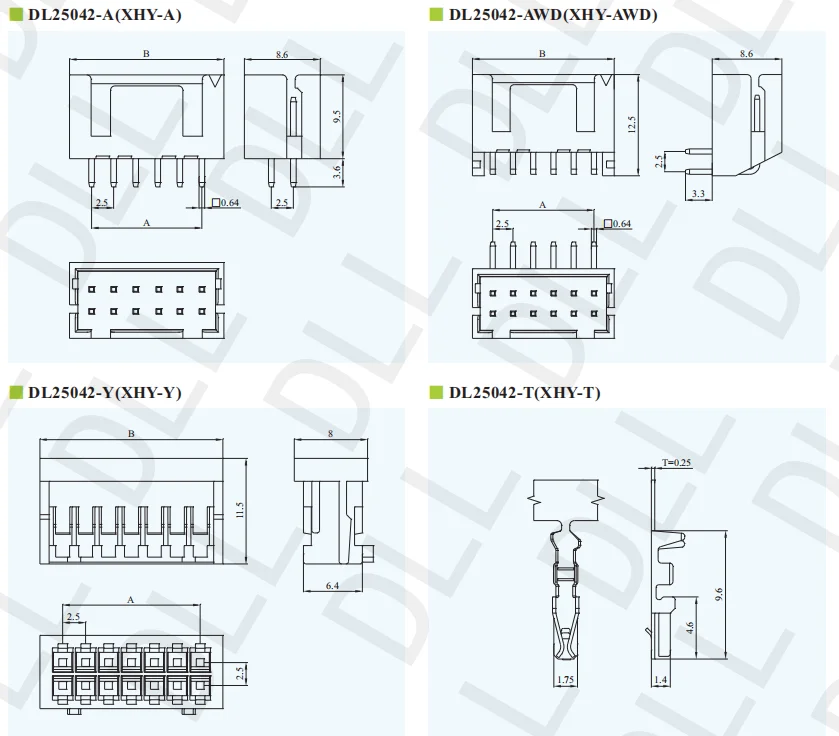
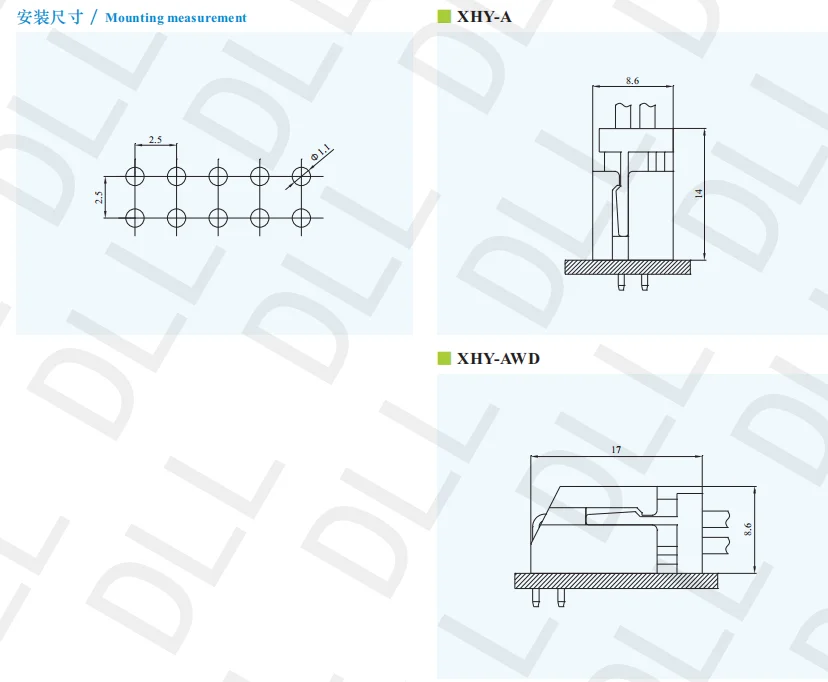
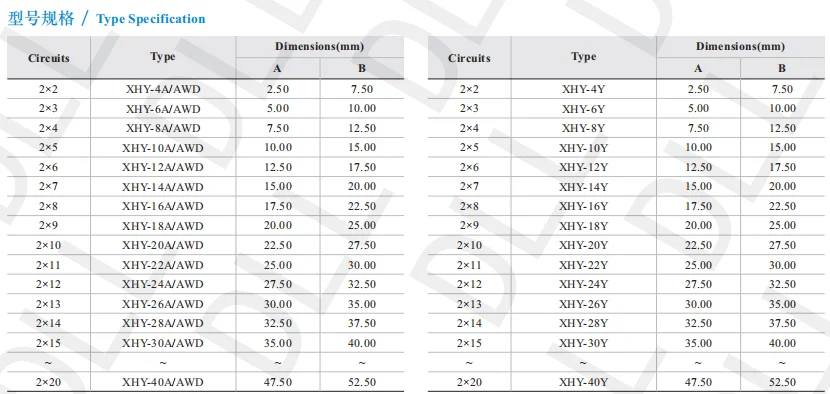
reemplace el conector de encabezado de clavija xhy de 2,5 mm; el conector de cabecera de clavija hrs xhy de 2,5 mm
Tensión nominal: | 250 V CA, CC |
Corriente nominal: | 3A AC/DC |
Resistencia de contacto: | 30 MΩ máx. |
Resistencia de aislamiento: | 1000MΩ mín. |
Tensión soportada: | 650 VCA/minuto |
Temperatura: | -25℃~+85℃ |
MATERIAL
FIAMBRES
ZHECONECTORES CO., LTD DE JIANG DELI
Alojamiento: | (Nylon) UL94-V0(2) |
Terminal: | Bronce fosforado, estañado |
Oblea: | (Nylon) UL94-V0(2) |
Más productos para que usted elija:

Solicitud
Sistema de control del robot: en el sistema de control, adquisición de señales de sensores y accionamiento conjunto del robot, el conector de aguja recta XHY se puede utilizar para conectar componentes como motores, codificadores y sensores de fuerza. Por ejemplo, el motor está conectado al controlador de articulaciones del robot a través de un conector de clavija recta para lograr un control de movimiento preciso de las articulaciones; El codificador devuelve la información de posición y velocidad de la junta al sistema de control a través de un conector de aguja recta, logrando un control de circuito cerrado.
ESPECIFICACIÓN
FIAMBRES
ZHECONECTORES CO., LTD DE JIANG DELI
reemplace el conector de encabezado de clavija xhy de 2,5 mm; el conector de cabecera de clavija hrs xhy de 2,5 mm
Tensión nominal: | 250 V CA, CC |
Corriente nominal: | 3A AC/DC |
Resistencia de contacto: | 30 MΩ máx. |
Resistencia de aislamiento: | 1000MΩ mín. |
Tensión soportada: | 650 VCA/minuto |
Temperatura: | -25℃~+85℃ |
MATERIAL
FIAMBRES
ZHECONECTORES CO., LTD DE JIANG DELI
Alojamiento: | (Nylon) UL94-V0(2) |
Terminal: | Bronce fosforado, estañado |
Oblea: | (Nylon) UL94-V0(2) |
Más productos para que usted elija:
Solicitud
Sistema de control del robot: en el sistema de control, adquisición de señales de sensores y accionamiento conjunto del robot, el conector de aguja recta XHY se puede utilizar para conectar componentes como motores, codificadores y sensores de fuerza. Por ejemplo, el motor está conectado al controlador de articulaciones del robot a través de un conector de clavija recta para lograr un control de movimiento preciso de las articulaciones; El codificador devuelve la información de posición y velocidad de la junta al sistema de control a través de un conector de aguja recta, logrando un control de circuito cerrado.